



-
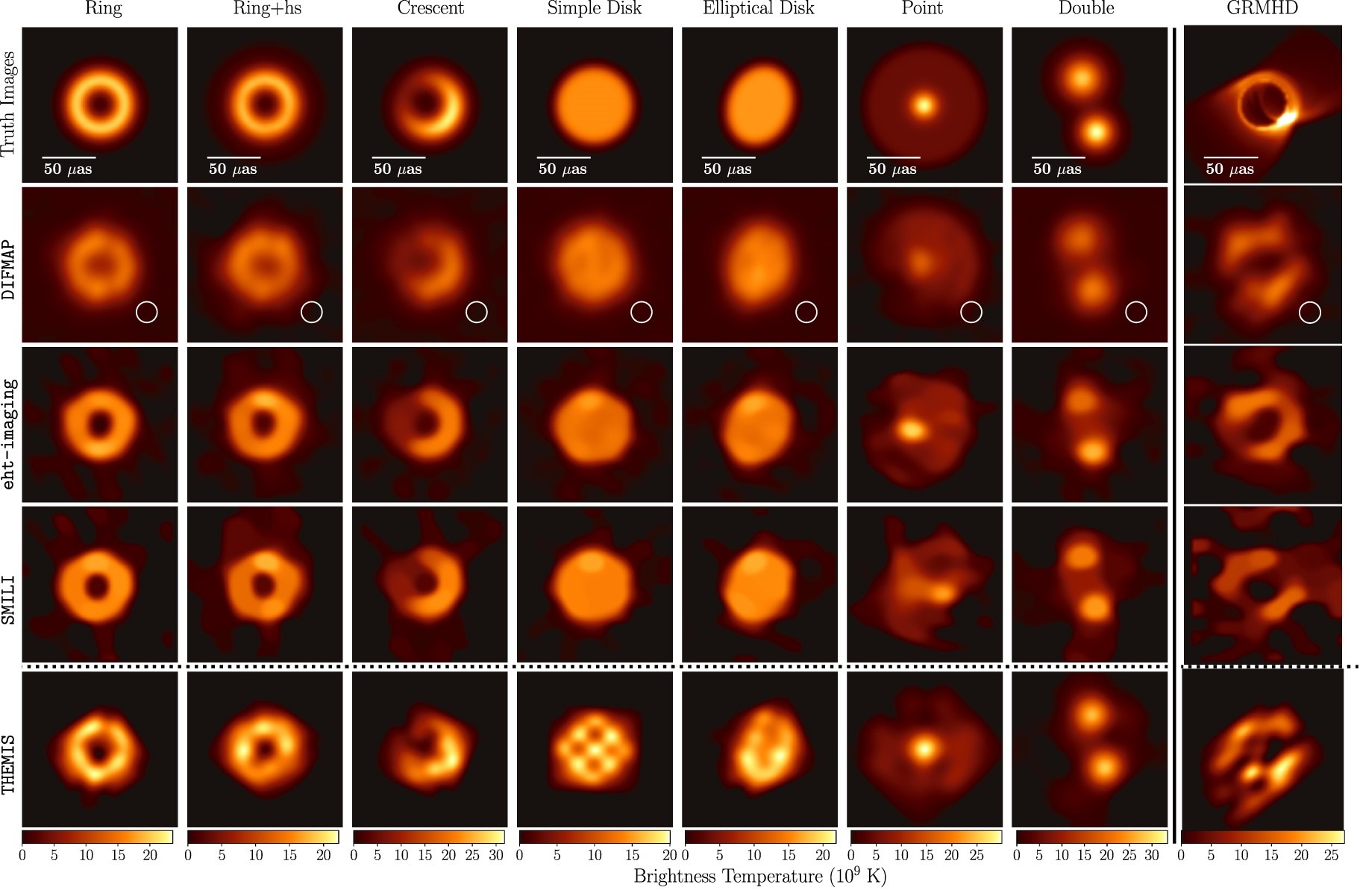
研究團隊假設黑洞有環狀、盤狀、點狀等不同幾何結構,運用電腦生成假想的觀測數據,藉這些數據訓練成像的程式,找出優良的參數。 圖|事件視界望遠鏡合作團隊
-
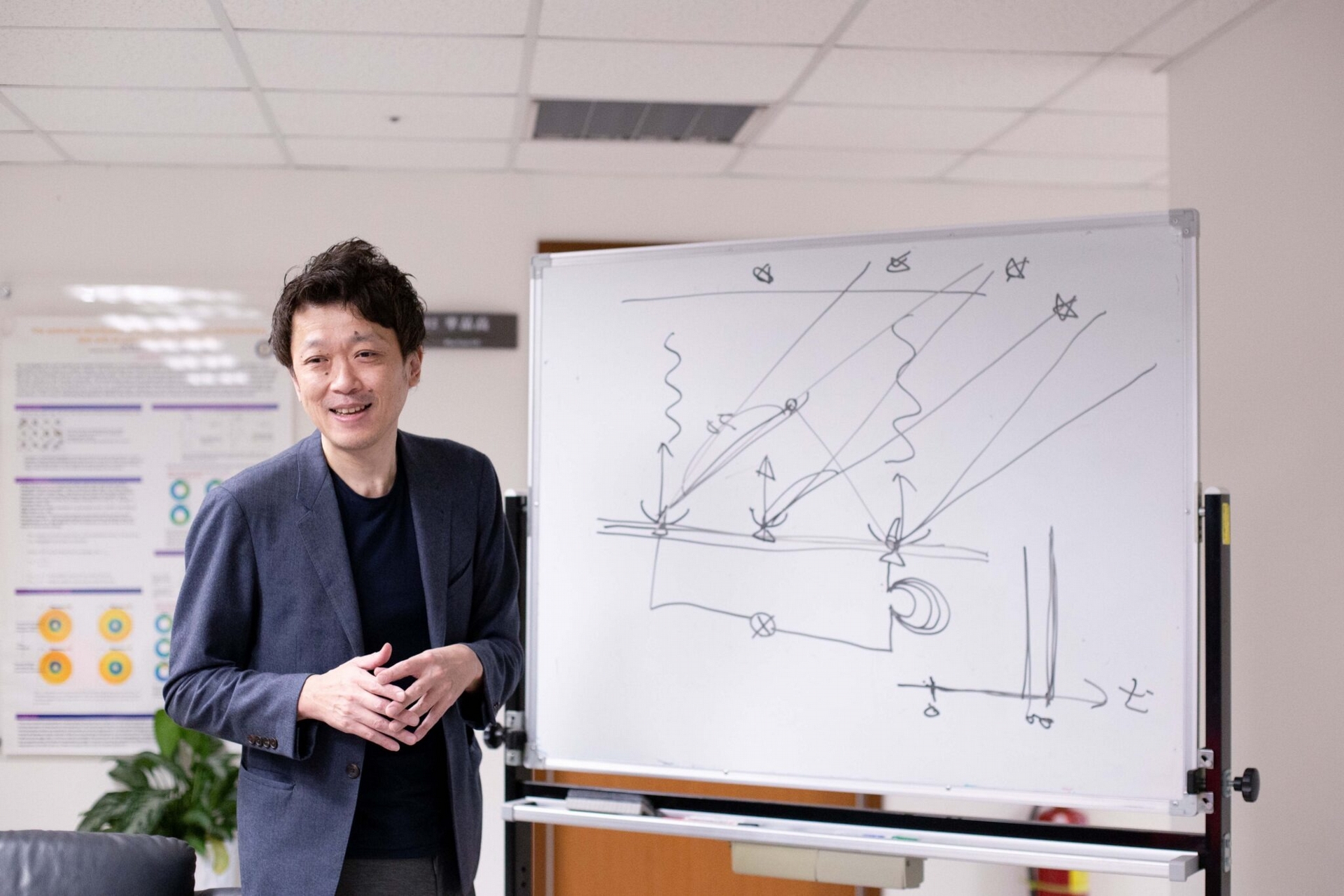
淺田圭一副研究員向研之有物團隊解說黑洞影像的處理細節。 圖|研之有物
-
人馬座 A 星是銀河系中央的超大質量黑洞,事件視界望遠鏡合作團隊成功重建此黑洞的影像。 圖|ESO/José Francisco Salgado, EHT Collaboration
-
淺田圭一說明,同一個天體的訊號,會在不同時間分別抵達兩個測站,而此時間差可用來還原天體的樣貌。 圖|研之有物
-
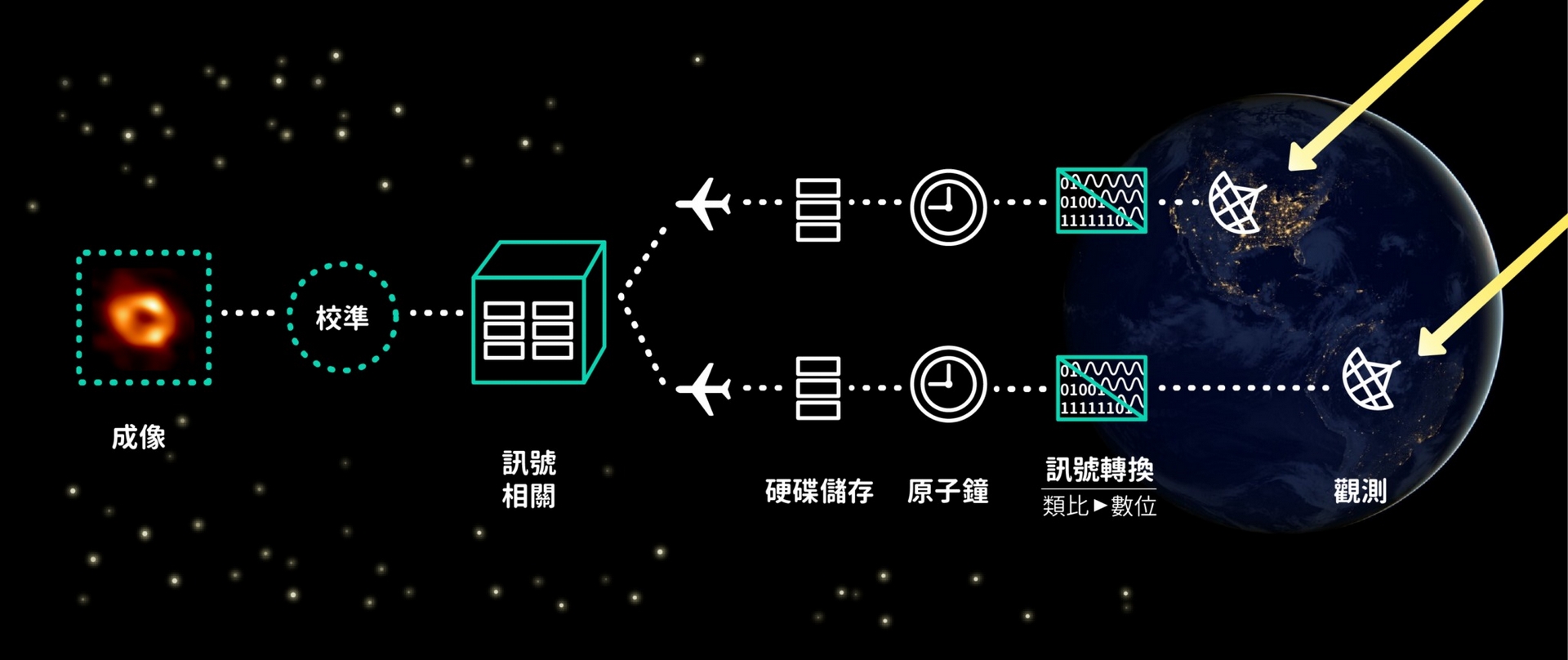
黑洞影像的產生流程,大致分為觀測、訊號相關、校準和成像四個階段。 圖|研之有物(資料來源|淺田圭一)
-
黑洞觀測的龐大數據儲存在氦氣填充硬碟(helium-filled hard disk drives; HDDs)內。 圖|淺田圭一
-
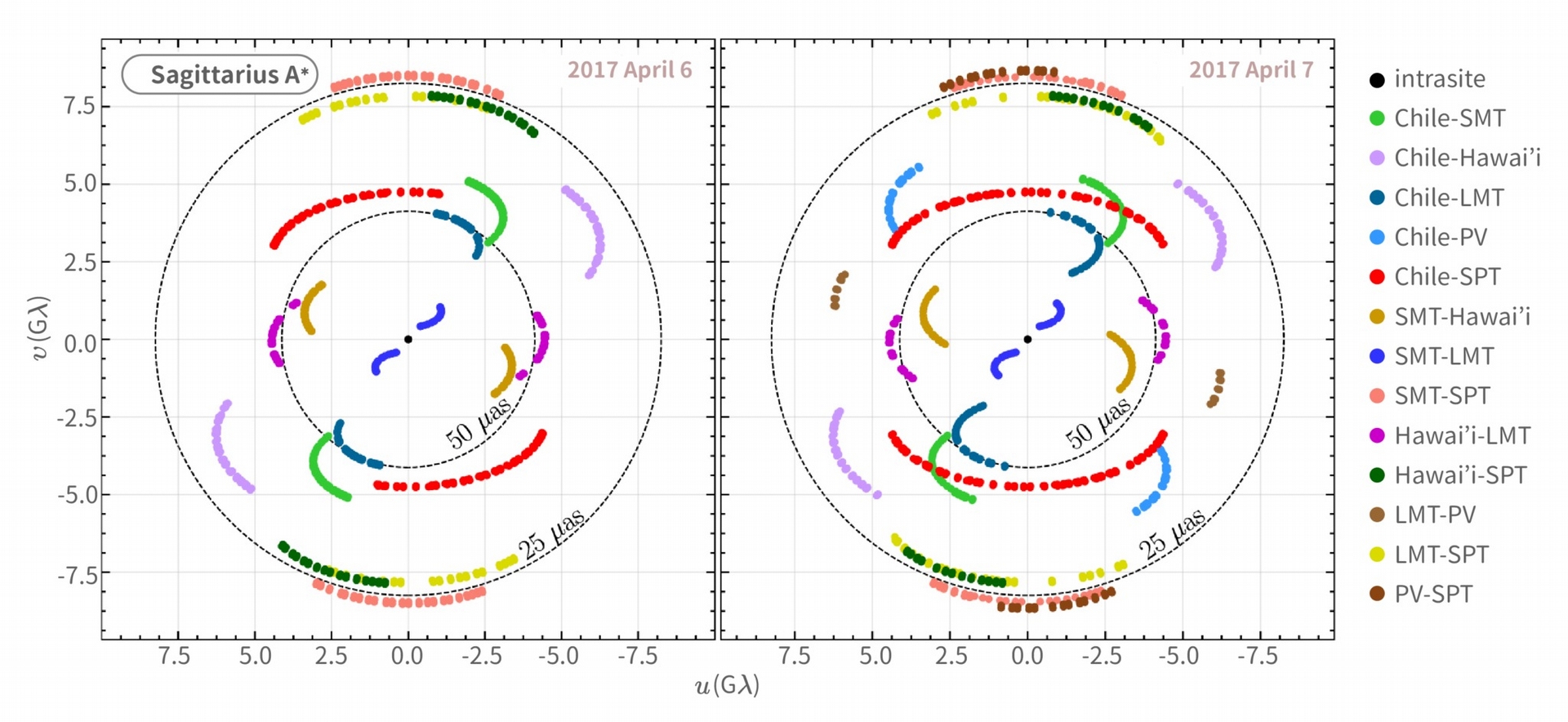
uv 平面是指電波天文影像經傅立葉轉換後的空間,上圖為銀河系中心黑洞影像的觀測結果。uv 平面上一個資料點,表示一條基線(望遠鏡兩兩一組的連線)所觀測到的數據。用不同顏色來表示不同望遠鏡組別的基線,並且隨著地球自轉,各條基線在 uv 平面上的覆蓋範圍也越多。天文學家需要有足夠的 uv 覆蓋範圍,才能妥善地還原天體的影像。 圖|事件視界望遠鏡合作團隊
-
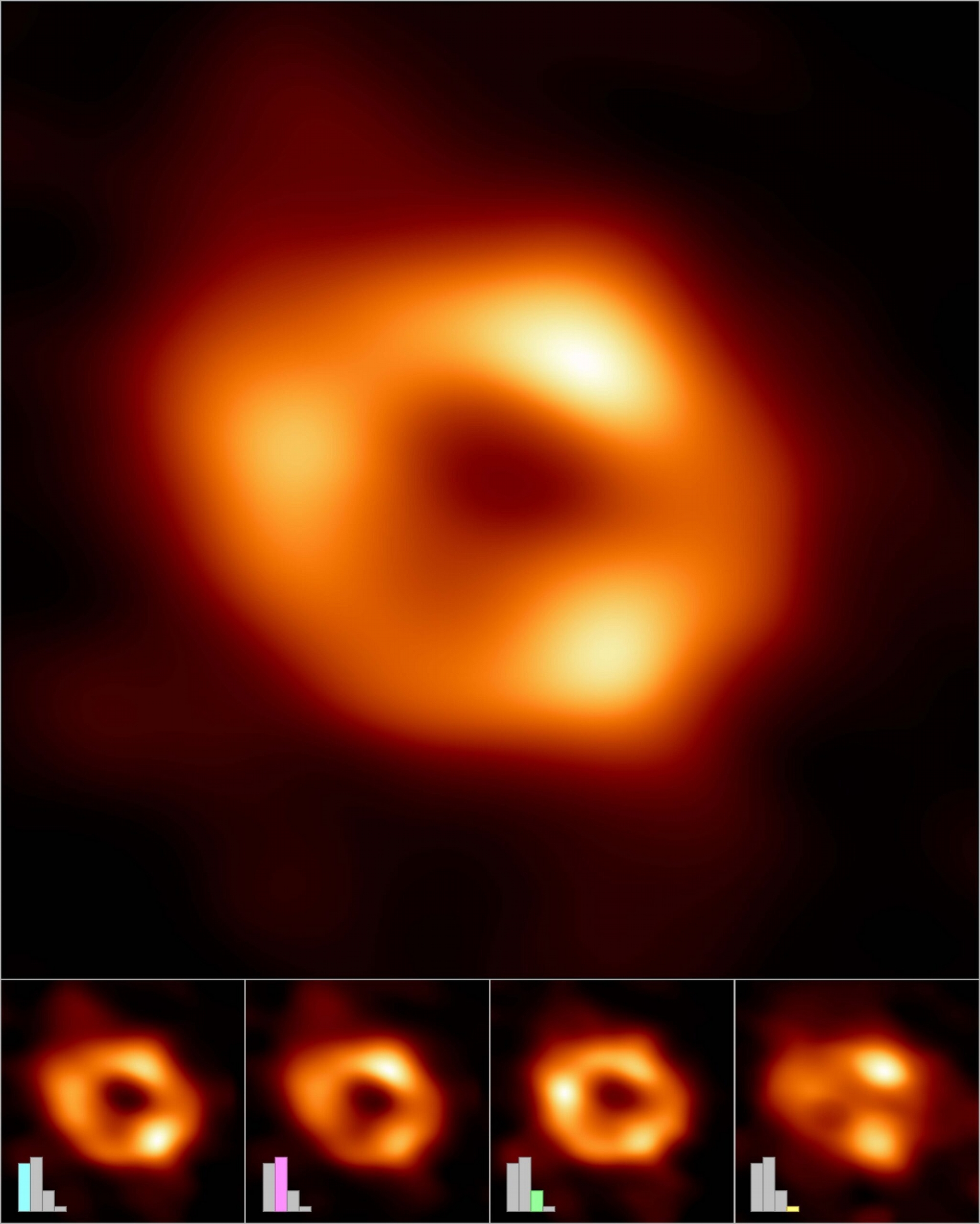
與數據吻合的銀河系中心黑洞影像數量繁多,研究團隊將最貼近觀測數據的影像分成四種類型。 圖|EHT, Caltech/IPAC & MIT Haystack Observatory
-
圖為銀河系中心黑洞影像,最終的黑洞影像是多種影像平均後的結果。四種類型影像旁的長條圖,代表該類型在所有優良參數影像中所佔的比例。 圖|事件視界望遠鏡合作團隊
-
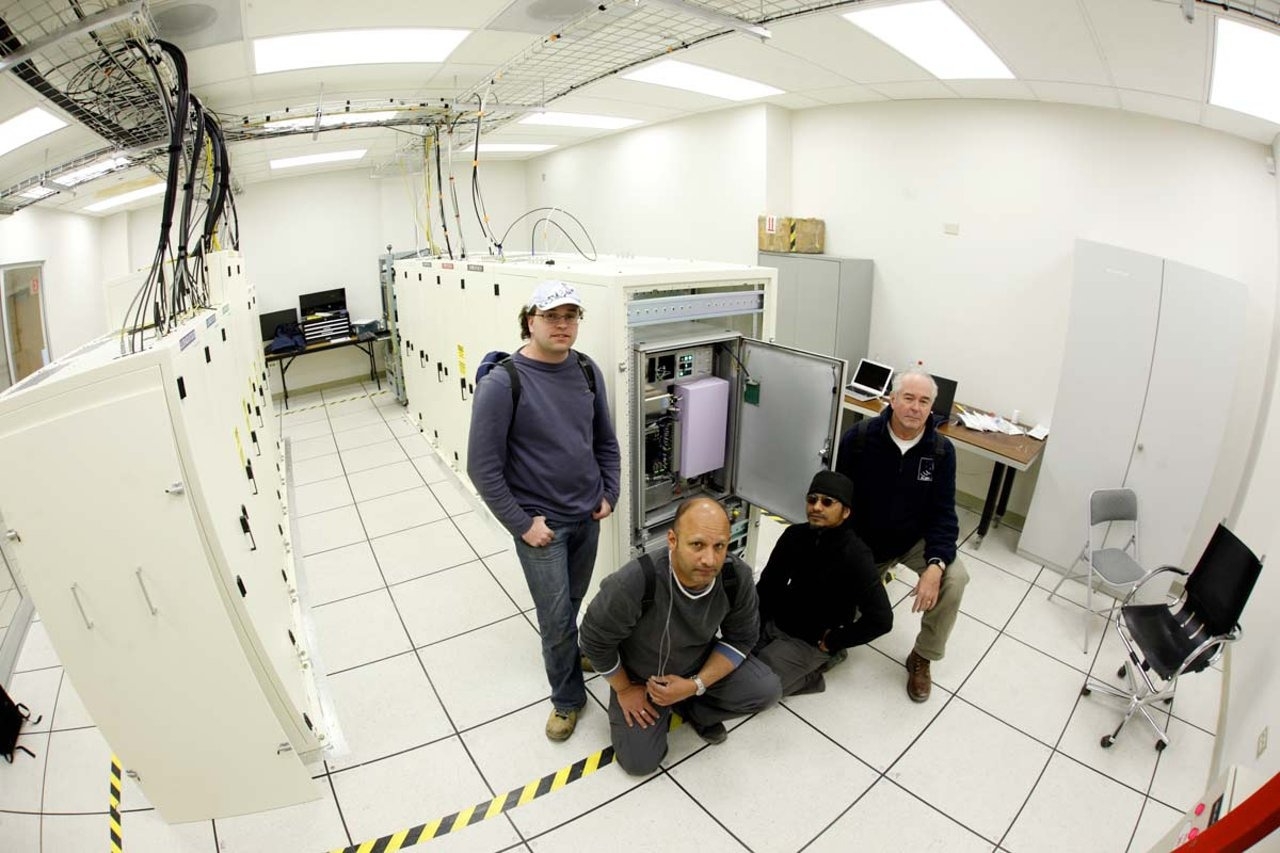
事件視界望遠鏡各個測站以原子鐘測定時間。原子鐘(粉色箱子處)受到層層保護,放置在高度穩定、不受干擾的環境中。圖片為技術人員與 ALMA 陣列操作場地的原子鐘合影。 圖|ALMA (ESO/NAOJ/NRAO), C. Padilla
Share
AD